
Satelliten Selfies
tl;dr: Ich mag es, die Erde aus dem Weltraum zu betrachten. Hier ist mein Versuch eines automatisierten Selfies aus einer erdnahen Umlaufbahn, indem ich das Signal eines russischen Wettersatelliten abgreife.
Motivation
Es macht etwas mit mir, mich unmittelbar aus einer grossen Distanz von oben zu betrachten. An meinem Bildschirm zu sitzen und ein Bild zu empfangen, das mich und meine Umgebung gleichzeitig aus 800 km Höhe zeigt, löst ein starkes Gefühl in mir aus. Etwas von Ganzheit und wahrscheinlich eine Prise Overview-Effekt überkommen mich. Kurz, die Bilder, die ich zuerst von NOAA und später von METEOR-Satelliten bekomme, rühren mich auf eine Art, die ich nicht ganz erklären kann.
Nach dem Abschalten der Satelliten der amerikanischen NOAA (National Oceanic and Atmospheric Administration), die an ihr Lebensende gekommen waren, gibt es im Bereich der niedrig aufgelösten und relativ einfach zu empfangenden Wettersatellitenbilder (LRPT) eine gute Alternative: die russischen METEOR-M2-Satelliten.
Die sonnensynchronen Umlaufbahnen der Satelliten M2-3 und M2-4 liefern dabei zurzeit zwei brauchbare Tages- und zwei Nachtüberflüge.
Die Funktionen und Protokolle der METEOR-Satelliten sind nicht frei dokumentiert. Die hier verwerteten Informationen stammen aus Sekundärquellen wie der Satdump-Dokumentation oder Presseberichten.
Sender
METEOR-M 2 Satelliten
Der erste Satellit der Meteor-M-Reihe, welche die neueste Generation dieser Baureihe darstellt, wurde am 7. September 2009 auf eine 830 km hohe sonnensynchrone Umlaufbahn gebracht. Die hier behandelten Satelliten M2-3 und M2-4 wurden am 27. Juli 2023 bzw. 29. Februar 2024 von Wostotschny aus gestartet.
MSU-MR
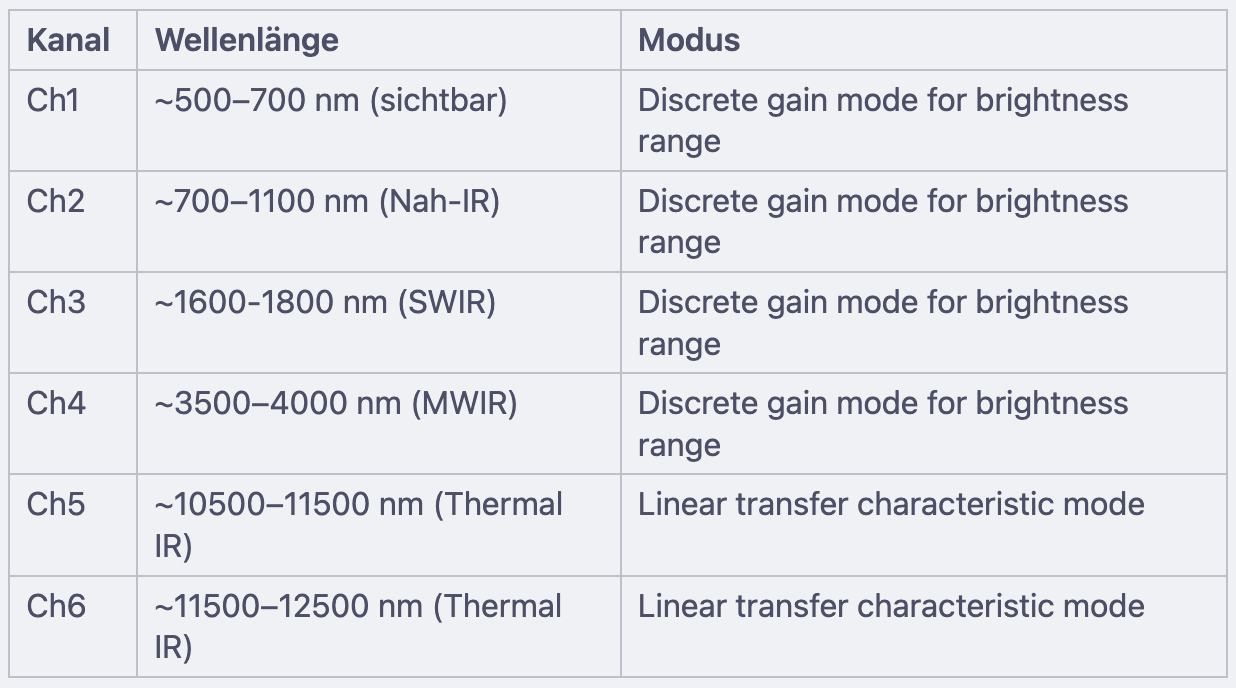
Die Satelliten scannen auf sechs Kanälen die Atmosphäre und Erdoberfläche. Das relevante Instrument dazu ist das MSU‑MR, ein multispektraler VIS/IR‑Scanner. Die ersten drei Kanäle, die für unseren Empfang relevant sind, arbeiten in folgenden Spektrumsbereichen:
ch1: 500 - 700 nm (vis)
ch2: 700 - 1100 nm (nahes IR)
ch3: 1600 - 1800 nm (IR)
Aus diesen Kanälen lassen sich Falschfarbenbilder erzeugen, mit denen Aussagen über die Wolken und somit das Wetter gemacht werden können. Für Nachtüberflüge liefert nur ch3 brauchbare Daten, die visuellen Kanäle bleiben dunkel.
Funksignal
Die Bilder werden unmittelbar im LRPT-Format (Low Rate Picture Transmission) auf 137.9 MHz[1] zurück zur Erde gesendet. Dieses System löst APT (Automatic Picture Transmission) ab, das seit den 1960er Jahren existiert. Die so erhaltenen Bilder haben eine Auflösung von 1 km/Pixel (APT: 4 km/Pixel).
Empfänger
Hardware
Der Empfang der Bilder geschieht mittels eines Setups aus Antenne und SDR-USB-Stick (Software Defined Radio), der an einen Raspberry Pi angeschlossen ist.
QFH-Antenne Diamond KE-137
SDR NOOELEC NESDR SMArTee
Raspberry Pi 4B
Die Platzierung der Antenne hat sich hier im Verlauf des Versuchs als wesentlich herausgestellt. An einem Seitenarm des Antennenmasts montiert, liefert die Antenne ein deutlich schlechteres SNR als oben auf dem Hauptmast montiert.
Satdump
Satdump hat sich meiner Meinung nach zu einem Quasi-Standard für die Dekodierung von Radiosignalen entwickelt. Es unterstützt die Dekodierung und Verarbeitung eines ausgewählten Portfolios von First-Party-Produkten von Weltraum- und Wetterbehörden [2]. Dabei kann es auch direkt zur Aufzeichnung von Signalen über ein angeschlossenes oder über API/Netzwerk erreichbares SDR-Device verwendet werden.
Satdump CLI
Als CLI eingesetzt, übernimmt Satdump auf dem Raspberry Pi das Autotracking, die Aufzeichnung und die Dekodierung der empfangenen Daten. Der Prozess kann damit automatisiert werden und erfolgt ohne weitere Interaktion.
Ein systemd-Service startet und überwacht satdump autotrack; die Konfiguration findet sich im Anhang (satdump config.txt).
Als Ergebnis werden die Bilder der verschiedenen Kanäle, Telemetriedaten des Satelliten sowie korrigierte, überlagerte oder mit Karten versehene Bilder auf der Maschine — oder genauer: einem angeschlossenen NAS — gespeichert.
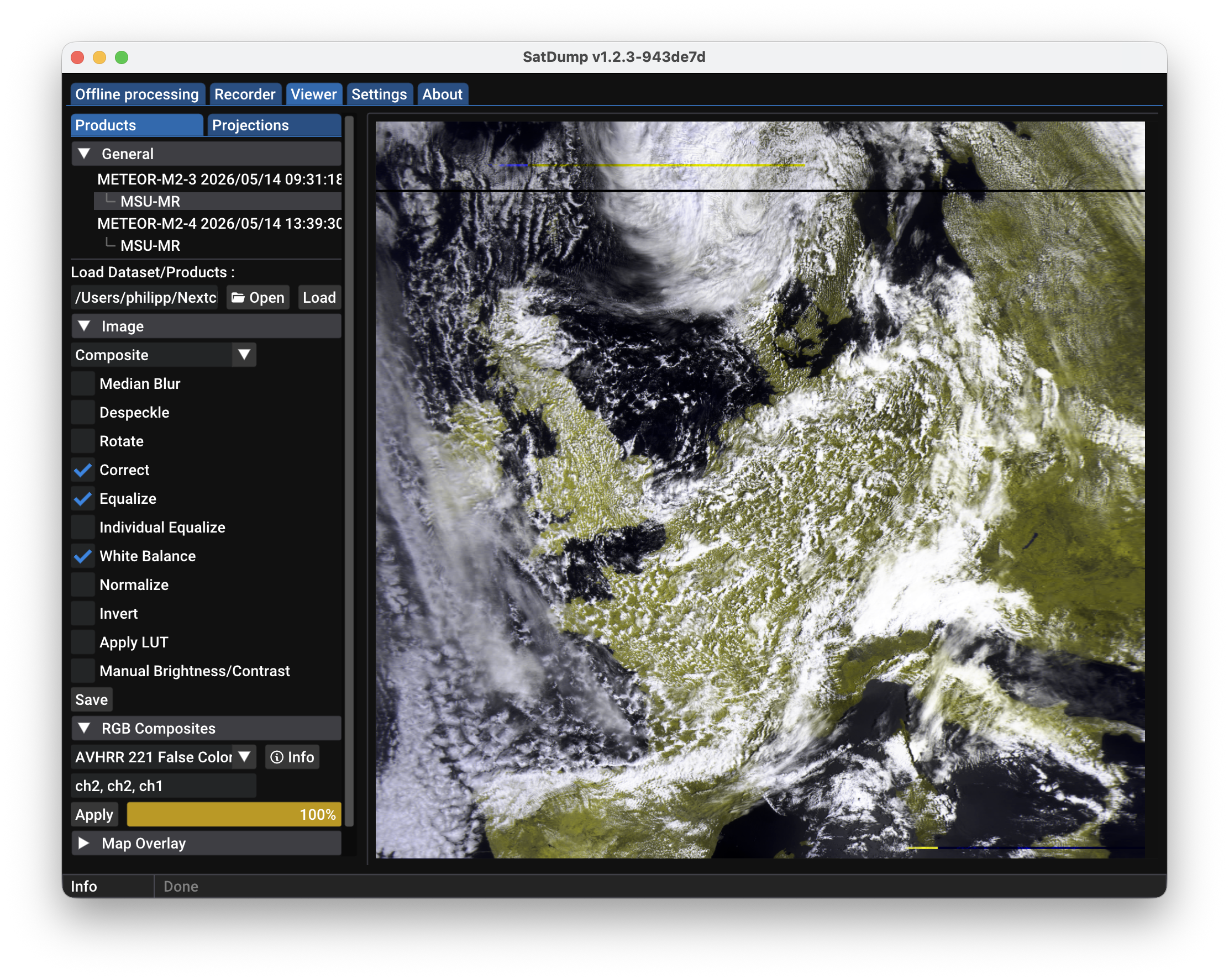
Satdump GUI
Die GUI wird in diesem Fall zur Anzeige der erhaltenen Bilder verwendet. Hier können die drei Kanäle (ch1, ch2, ch3) separat angezeigt werden oder die durch Überlagerung erzeugten Falschfarbenbilder.
Satdump GUI
Ergebnisse
Synchronisierung und Dekodierung des LRPT-Signals
Typischer Auszug aus Satdump Log journalctl -u satdump -f bei erfolgreicher Synchronisation:
May 15 13:18:40 radio satdump[805]: [13:18:40 - 15/05/2026] (I) Progress nan%, SNR : 4.374022dB, Peak SNR: 8.626699dB
May 15 13:18:40 radio satdump[805]: [13:18:40 - 15/05/2026] (I) Progress nan%, Viterbi : SYNCED BER : 0.118408, Deframer : SYNCED
May 15 13:18:50 radio satdump[805]: [13:18:50 - 15/05/2026] (I) Progress nan%, SNR : 4.380789dB, Peak SNR: 8.626699dB
May 15 13:18:50 radio satdump[805]: [13:18:50 - 15/05/2026] (I) Progress nan%, Viterbi : SYNCED BER : 0.184326, Deframer : SYNCED
Das bedeutet: Das Signal hebt sich mit ausreichendem Abstand vom Rauschpegel ab (SNR: Signal-to-Noise Ratio) und kann dekodiert werden.
Bild Daten
Ein Beispiel für das Ergebnis eines Überflugs über Mitteleuropa als überlagertes Falschfarbenbild (AVHRR 221).

Nachmittags-Pass vom 14.5.2026, METEOR-M2-4 (2026-05-14_133930_msu_mr_AVHRR 221 False Color)
Telemetrie Daten
Nur METEOR-M2-4 liefert Stand heute (15.5.2026) brauchbare Telemetriedaten.
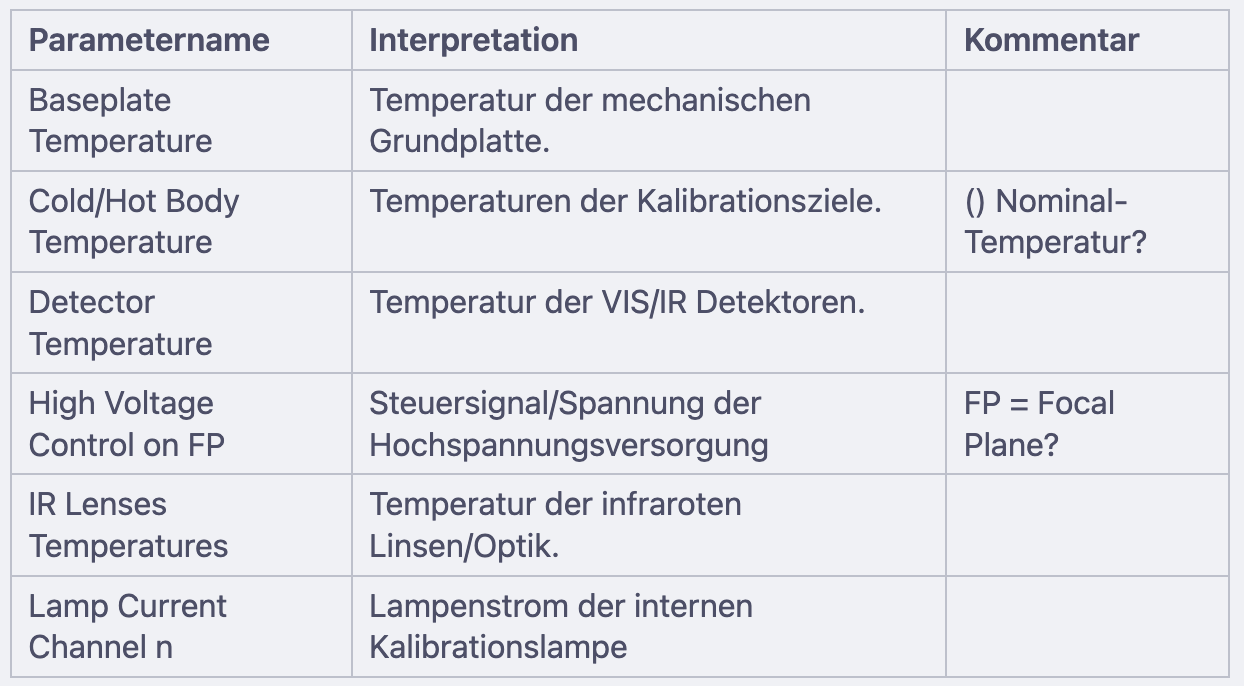
MSU-MR Housekeeping Daten
Die in analog_tlm auftauchenden Größen passen sehr gut zu den bekannten Kalibrations‑ und Temperatur‑Messpunkten dieses Instruments (Basisplatte, „cold body“, „hot body“, Lampenströme, IR‑Optik). Annahmen zu den Einheiten:
Temperaturen: K
High Voltage: V(?)
Lamp Current: mA(?)
analog_tlm — Temperatur- und Kalibrationsgrössen
"analog_tlm": {
"Baseplate Temperature": 204,
"Cold Body Temperature 1 (258K)": 215.14999999999998,
"Cold Body Temperature 2 (258K)": 215.14999999999998,
"Cold Body Temperature 3 (258K)": 215.14999999999998,
"Detector Temperature Channel 3": 178,
"Detector Temperature Channel 5": 155,
"Detector Temperature Channel 6": 134,
"High voltage control on FP VK1": 83,
"High voltage control on FP VK2": 93,
"Hot Body Temperature 1 (313K)": 315.15,
"Hot Body Temperature 2 (313K)": 314.15,
"Hot Body Temperature 3 (313K)": 212.14999999999998,
"IR Lenses temperatures": 85,
"Lamp Current Channel 1": 146,
"Lamp Current Channel 2": 139,
"Lamp Current Channel 3": 142
},
Betriebsmodus Daten
bos_operating_mode = basic — Interpretation: Das Instrument läuft im normalen Grundbetrieb (nicht Test- oder Kalibriermodus).
Kanalkonfiguration (MSU-MR hat 6 Kanäle)
Fokalebenen-Detektoren (je 4 Fotoelemente pro Ebene)
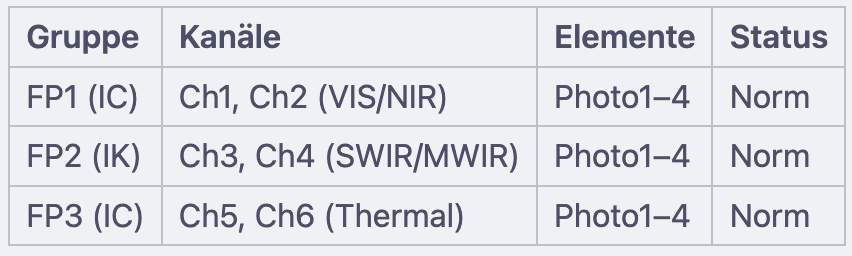
Alle 12 Fotoelemente melden „Norm" — keine Ausfälle oder Degradation.
Systemstatus
included_pu_rg = included — Spannungsregler der Stromversorgung ist aktiv eingebunden.
leveling_channel_123 = disabled — Wahrscheinlich Pegelanpassung (AGC) für Ch1–3 die deaktiviert ist. Die Station arbeitet wohl mit festen Verstärkungswerten.
synchronization_1 = enabled / synchronization_2 = enabled — Beide Scan-Synchronisationssysteme laufen (Primär + Redundanz aktiv).
presenter_dns_sensor = reserve — Der Sonnenrichtungssensor (DNS) steht auf reserve. Der Status deutet auf eine Rollen‑/Konfigurationsangabe (Reservegerät, Backup‑Kanal, nicht-primärer Sensor). Für METEOR-M2-4 ist explizit dokumentiert [3], dass Sternsensoren des Typs БОКЗ‑М2 an Bord sind, die wohl die Orientierung übernehmen; die Sonnensensoren dienen hier mutmasslich als Backup.
Schutzdeckel
protective_cover_1 = closed — Deckel 1 ist geschlossen. Welche Optiken/Sensoren werden hier geschützt?
protective_cover_2 = open — Deckel 2 ist offen. Höchstwahrscheinlich die Abdeckung für das MSU-MR.
Finaler Zustand
Qualitativ hochwertige Bilder sowie Telemetrie-Daten werden automatisiert auf Basis einer Überflug-Vorhersage aufgezeichnet. In der Regel sind das je zwei Tages- bzw. Nachtüberflüge. Die Speicherung erfolgt auf einem über das Netzwerk angeschlossenen NAS-Laufwerk. Das alles geschieht über Wochen und Monate ohne manuellen Eingriff. Dort werden die Daten gesammelt, ausgewertet und weiterverarbeitet.
Herausforderungen
Regionale Störquellen
M2-3 und M2-4 senden beide auf 137.9 MHz mit 80k LRPT als Primärmodus; 137.1 MHz / 72k ist die alternative Betriebsart desselben Satelliten und im Moment nicht aktiv (s. N2YO). Beim versuchsweisen Empfang auf 137.1 MHz war auf dieser Frequenz ein starkes Signal sichtbar, das sich beim Demodulieren als Rundfunksignal eines benachbarten Radiosenders herausgestellt hat. Es konnte dabei nicht mit Sicherheit festgestellt werden, ob es sich um eine Spiegelung oder ein Originalsignal handelte.
Lokale Störquellen
Ein MeshCore-Sender, der am selben Mast betrieben wird, hat zu Ausfällen von Frames und damit streifenweisen Störungen im Bild geführt. Durch Zurückfahren der Sendeleistung des Senders konnten die Störungen eliminiert werden.
QFH-Empfang
Grundrauschen bei -75 bis -80 dBFS, kein klares Signal. Diagnostisch wurden Antennenposition, Gain, versuchsweise LNA (mit negativem Ergebnis) und RF-Pfad durchgearbeitet, bis das QFH-Setup direkt am Raspberry Pi funktionierte. Die entscheidende Verbesserung brachte eine Repositionierung der Antenne an die Spitze des Hauptmasts mit 360° freier Sicht.
Ausblick
Neben dem LRPT-Signal kann von den METEOR-M-Satelliten auch das HRPT-Signal (High Rate Picture Transmission) empfangen werden. In diesem Signal werden die Kanäle ch4–ch6 sowie zusätzliche Instrumente (s. Anhang HRPT Nutzlast- und Systemdaten) enthalten sein. Das HRPT-Signal wird über eine L-Band-Frequenz [4] gesendet und ist wesentlich schwieriger zu empfangen. Erste Versuche mit einer L-Band-Helix-Antenne, einem LNA (Low Noise Amplifier) und dem Nachfahren der Satellitenposition von Hand sind fehlgeschlagen. Hier sind möglicherweise weitere Versuche oder eine andere Antenne (Dish) notwendig.
Im Rahmen der L-Band-Versuche wurden zufällig vielfältige und starke Signale empfangen, die nach Recherche einem Inmarsat-Satelliten zuzuordnen sind. Der Erkundung und Dekodierung dieser Signale widme ich eine eigene Lab Note.
Anhang
MSU-MR
Haupt‑VIS/IR‑Radiometer (6 Spektralbänder), liefert globale Bewölkungs‑ und Oberflächenbilder. 1 km Auflösung, Schwadbreite ~2800 km — russisches Pendant zum AVHRR. Nachts liefern die Kanäle 1+2 fast nur Schwarz, der 3.9-µm-SWIR-Kanal trägt das thermische Bild. Nur Tages-Pässe sind für volle Composites zu gebrauchen.
AVHRR-221
221, also known as AVHRR False Color, is the most basic visible-light enhancement available for most of the polar-orbiting main radiometers.
The name 221 comes from the usage of AVHRR channel 2 (0.63 um) in the red and green position, and 1 (0.862 um) in the blue position.
Appearance
Land appears yellow (vegetated areas) or gray (deserts), while sea appears deep blue or black.
Snow and ice appear white, including sea ice.
Clouds appear white.
Fog appears violet-white, but is hard to see.
Intended usage
General purpose imagery at daytime.
Limitations
Hard to determine the cloud nature.
Hard to discriminate between cirrus clouds and fog.
HRPT Nutzlast- und Systemdaten
Aus der spezifizierten HRPT‑Datenstruktur für METEOR‑M [5]:
MSU‑MR – Multispectral Scanning Radiometer
Rolle: s.o. unter MSU-MR
HRPT: Alle 6 Kanäle in voller Auflösung werden übertragen (im Gegensatz zu LRPT mit nur 3 Kanälen).
MTVZA‑GY – Microwave Imager/Sounder (МТВЗА‑ГЯ)
Rolle: 29-/30-kanaliger Mikrowellen-Radiometer/Sounder (10–183 GHz) für Temperatur-/Feuchteprofile, Niederschlag, Wolkenwasser, Schneedecke, Meeresoberflächenwind, auch bei Bewölkung.
HRPT: Rund 30 Kanäle des MTVZA werden in Echtzeit über HRPT mitgesendet; damit bekommt man zusätzlich Mikrowellen-Soundings, die in LRPT überhaupt nicht vorkommen.
DCP/SSPD – Data Collection Platform / Data Collection System
BIS‑M – Onboard Information System (БИС‑М)
Rolle: Bord-Informationssystem, das interne Status-, Konfigurations- und ggf. Routing-Informationen aggregiert.
HRPT: BIS-M-Daten werden zusammen mit den Nutzlastdaten übertragen, typischerweise für Boden-Verarbeitung/Monitoring [5-2].
Spacecraft RTC – Real Time Clock
Rolle: Zeitbasis des Satelliten, dient zur Zeitstempelung aller Messdaten und zur Synchronisation der Bodenverarbeitung.
HRPT: RTC-Informationen werden im HRPT-Stream mitgegeben, damit alle MSU-MR/MTVZA-Frames eindeutig zeitlich referenzierbar sind [5-3].
Spacecraft Telemetry (Bus‑HK)
Rolle: Plattform-Telemetrie (Spannungen, Temperaturen, Lageregelung, Modus-Flags usw.) des Satellitenbusses.
HRPT: Ein Teil dieser Housekeeping Daten ist direkt im HRPT-Stream eingebettet (nicht nur im separaten TT&C-Link), sodass Nutzer parallel zu den Bildern auch relevante HK-Parameter sehen können.
NOAA Vergleich
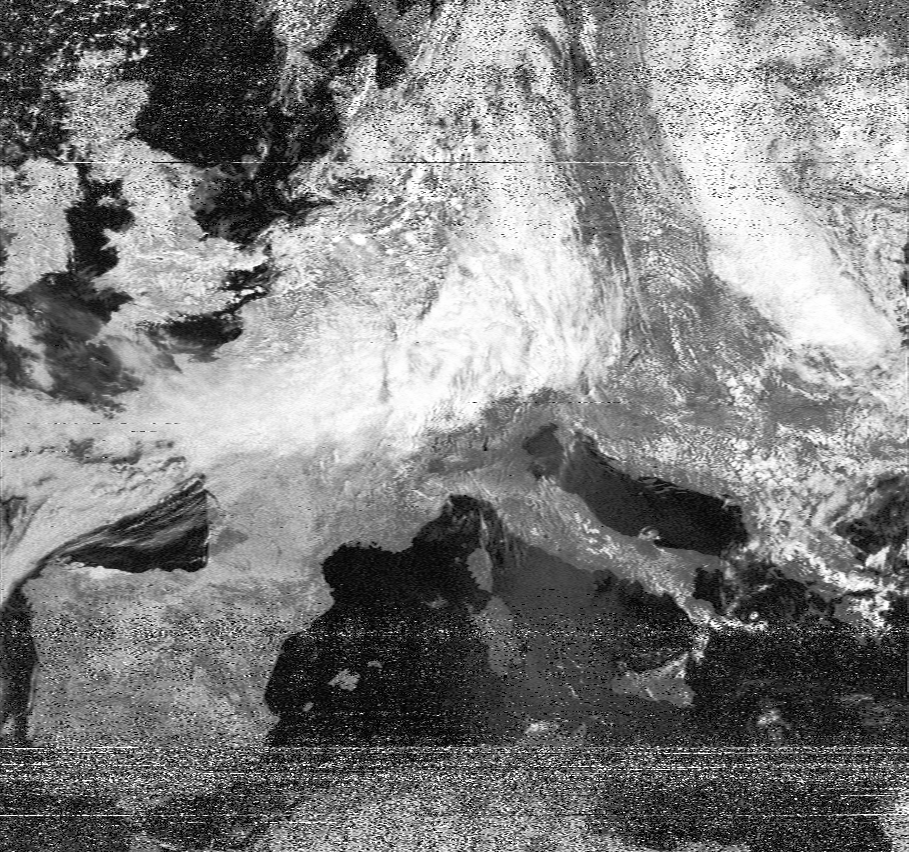
Vergleichsbild des NOAA-19 Satelliten vom Mai 2025
avhrr_3_APT_channel_A_corrected
https://new.ras.ru/press-center/pribory-instituta-kosmicheskikh-issledovaniy-ran-ustanovleny-na-bortu-apparata-meteor-m/↩︎
https://www.esa.int/Applications/Connectivity_and_Secure_Communications/Satellite_frequency_bands↩︎
https://www.sigidwiki.com/wiki/METEOR-M_High_Resolution_Picture_Transmission_(HRPT)↩︎↩︎↩︎↩︎